Open-Source Real-Time Processing for Physical AI
Holoscan is an open-source library for building multi-modal, multi-rate processing pipelines with accelerated I/O and TensorRT-powered inference in Python or C++
GitHub Download (deb) Download (PyPI) Connect with the Community Discord Forums
Build Complex Multi-Modal,
Multi-Rate Applications
Easy-to-create operators
Implement operators in Python or C++, compose them in a graph, and iterate quickly with clear APIs.
Graph-based natural concurrency
Define dataflow graphs and let the runtime schedule work across operators — no manual threading or locks.
Low memory footprint
Multi-threaded single-process multi-threaded model and efficient message passing so you fit real-time pipelines on edge devices.
Deterministic Scheduling and Resource Allocation
CUDA Green Context resource isolation
Isolate GPU work per operator for better resource control and to avoid interference between pipeline stages.
Introspection, logging, and timing analysis
Built-in tools to trace execution, log events, and analyze timing so you can tune and debug pipelines.
GPU Streaming Graphs
Run entire pipelines on the GPU with CUDA graphs and streaming; minimize CPU involvement for predictable latency.
Low-Latency CPU-Offloaded Accelerated I/O
Holoscan Sensor Bridge support
Ingest high-bandwidth sensor and network streams with HSB and Ethernet support, ready for real-time processing.
Rivermax, DPDK, and GPUNetIO examples
Reference implementations and examples using industry frameworks for low-latency, CPU-offloaded I/O.
Designed for 100+ Gbps sensor workloads
Architected to handle extreme throughput so your pipelines keep up with multi-Gbps sensors and feeds.
$ pip install holoscan-cu12
$ python
Python 3.12.3
>>> from holoscan.core import Application
>>> app = Application()
>>> app.run()
█Install in seconds
Holoscan offers both Python and C++ packages, as well as NGC containers, Conda packages, and Yocto recipes.
The full installation guide (NGC containers, Conda, platform-specific steps) is available in the SDK Installation docs.
- Yocto/OpenEmbedded: For Yocto-based deployments, check out the meta-tegra-holoscan layer.
Define your own operators
Operators — the nodes in your compute graph — support any number of input or output ports. Define them in your application or package them into reusable libraries.
Call into CuPy, MATX, or any other accelerated libraries. Holoscan uses the industry-standard DLPack format for tensors.
class ResampleTwoThirdsOp(Operator):
def setup(self, spec: OperatorSpec):
spec.input("in")
spec.output("out")
def compute(self, op_input, op_output, context):
sig = op_input.receive("in")
resample_sig = cusignal.resample_poly(sig, 2, 3)
op_output.emit(resample_sig, "out")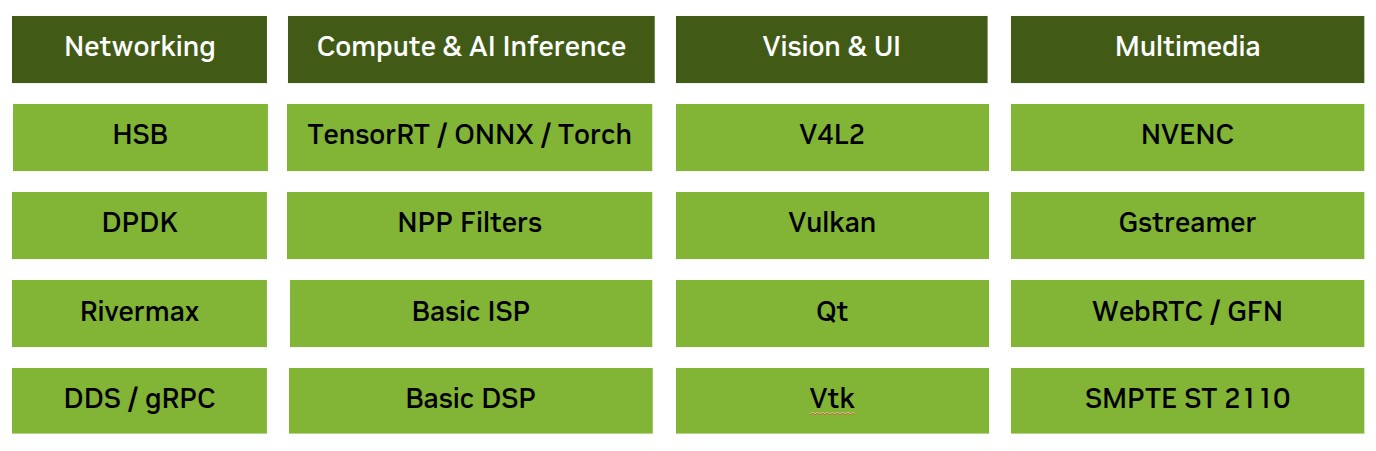
Leverage built-in operators
Browse our catalog, of built-in operators for I/O, inference, and viz, including TensorRT-based inference, EtherCAT motor control, and GeForce Now streaming server and client operators.
Plus, Holoscan plays well with others: bridge to ROS2, GStreamer, WebRTC (server and client), and DDS.
Wire up your graph
Create instances of your operators and any resources you need, and wire them together in your application. Each port on an operator has conditions that let the scheduler determine when to run the operator’s compute() method.
Holoscan provides both single-threaded and multi-threaded schedulers that evaluate your graph and schedule operations. Built-in resource management lets your operators use allocators, clocks, and other shared resources for memory and execution control.
from holoscan.core import Application
from holoscan.operators import FormatConverterOp, HolovizOp, V4L2VideoCaptureOp
from holoscan.resources import RMMAllocator
class WebcamViewer(Application):
def compose(self):
source = V4L2VideoCaptureOp(self, pass_through=True)
fmt = FormatConverterOp(self, in_dtype="yuyv", out_dtype="rgb888", pool=RMMAllocator(self))
viz = HolovizOp(self)
self.add_flow(source, fmt)
self.add_flow(fmt, viz, {("tensor", "receivers")})
app = WebcamViewer()
app.run()Holoscan Sensor Bridge
Low-latency, hardware-accelerated Ethernet for sensors and actuators
Low-latency Ethernet bridging
Enumerate, configure, and stream data, bridging Holoscan to any camera, radar, lidar, or other sensor or actuator.
Embedded open-source stack
Lightweight Verilog or software IP that integrates into any FPGA, MCU, SoC, or ASIC — with no external DRAM — plus, PC-based emulation for hardware-in-the-loop testing.
Full Thor support
Holoscan Sensor Bridge is the only hardware-accelerated Ethernet solution for Thor, and ships with open-source userspace drivers and example pipelines.
From the Blog
-
What's New in Holoscan 4.4
Holoscan 4.4 ships a Fern-based documentation site, native UYVY camera input, holoscan-cli guidance, JetPack performance tuning, and a stronger HoloHub ecosystem with DAQIRI networking and Sensor Bridge modules.
-
What's New in Holoscan 4.3
Holoscan 4.3 smooths operator authoring, hardens Holoviz display synchronization, adds clearer 10-bit visualization warnings, and fixes a MetadataDictionary emit crash.
-
What's New in Holoscan 4.2
GPU-resident graphs now support full DAGs (fan-out, fan-in, and parallel branches), the stack aligns with NVIDIA Production Branch 6, MatX is exported for downstream CMake projects, and HoloHub adds new reference apps alongside the release.
-
Announcing Holoscan SDK 4.0
Holoscan 4.0 introduces a GPU-resident, distributed runtime for building real-time Physical AI systems that ingest high-bandwidth sensor data, run AI and signal processing pipelines, and take deterministic actions in the physical world — enabling developers to build Raw-to-Insights sensor platforms entirely in software.
HoloHub: The Holoscan Ecosystem
Reference applications, operators, modules, tutorials, and benchmarks for building real-time AI sensor processing pipelines with Holoscan.